君乐宝:敢想、敢干、坚持!在企业发展中融入马拉松精神
在浩瀚的商业海洋中,总有一些企业以其独特的精神内核,引领着行业前行的方向。作为一家具有“马拉松基因”的企业,君乐宝乳业集...
科技
4 小时前
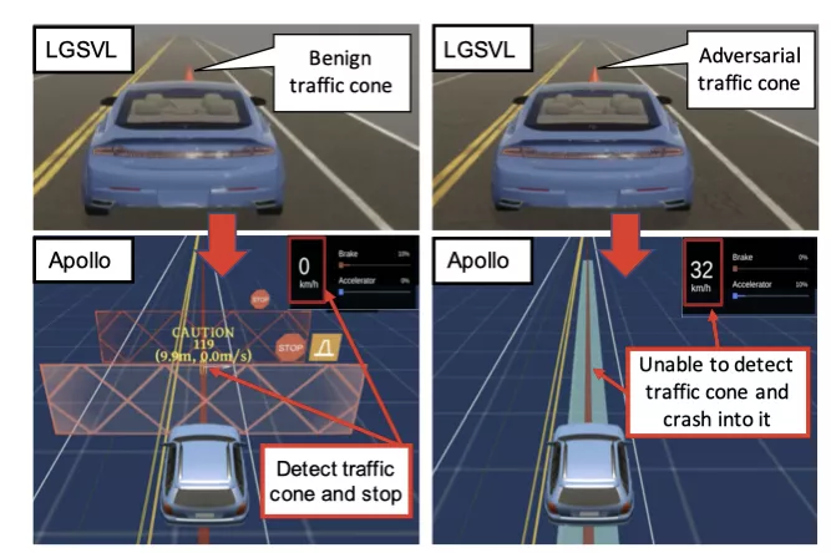
近日,一项研究显示,L4自动驾驶使用的多传感器融合感知(Multi-Sensor Fusion based Perception)技术存在一个安全漏洞:攻击者可以在道路中间放置一个3D打印的恶意障碍物,使自动驾驶车辆的camera和LiDAR机器学习检测模型都识别不到,并直接撞上去。
此项研究题为《对摄像头和激光雷达都不可见:物理世界攻击下的基于多传感器融合的自动驾驶感知安全》(Invisible for both Camera and LiDAR: Security of Multi-Sensor Fusion based Perception in Autonomous Driving Under Physical-World Attacks),已正式发表在计算机安全四大顶会之一IEEES&P2021。该研究团队来自加州大学尔湾分校(UCIrvine),专攻自动驾驶和智能交通的研究。
在自动驾驶系统里,实时感知周围环境是所有重要驾驶决策的最基本前提。当前,L4自动驾驶系统逐渐商业化,百度已经在北京、长沙和沧州开始大规模测试无人驾驶出租车,Waymo已经开始在美国凤凰城测试不需要安全驾驶员的完全自动驾驶出租车。
国际自动机工程师学会将自动驾驶从L1到L5分成了五个等级,L5是最高级的全自动化,L4级则是高度自动化,由机器接管全部操作,人不需要对所有的系统请求做出回答。有个关于L4级自动驾驶的戏说:看起来很像L5,但用户手册写了一长串免责声明,核心思想是这也不行,那也不行。
L4自动驾驶系统普遍采用多传感器融合设计,即融合如激光雷达(LiDAR)和摄像头(camera)等不同的感知源,从而实现准确并且鲁棒的感知。
多传感器融合算法有一项前提,所有感知源不会同时都被攻击,或可以同时被攻击。这个基本的安全设计假设一般都是成立的,因此多传感器融合通常被认为是针对现有无人车感知攻击(单感知源攻击)的有效防御策略。
来自加州大学尔湾分校(UCIrvine)的研究者证明了同时攻击自动驾驶多传感器融合感知中所有感知源的可能性。他们发现,在现实世界识别过程中,这种多传感器融合的障碍物感知存在漏洞,会无法成功检测研究者设置的障碍物并直接撞上去的情况。
具体而言,3D障碍物的不同形状可以同时导致LiDAR点云中的点位置变化和camera图像中的像素值变化,因此攻击者可以利用形状操作,同时向camera和LiDAR引入输入扰动。
生活中路面可能出现的形状奇怪或破损的物体,可以研究者的物理世界攻击向量模拟:可操纵形状的对抗3D物体
为了评估这一漏洞的严重性,研究者设计了MSF-ADV攻击,它可以在给定的基于多传感器融合的无人车感知算法中自动生成上述的恶意的3D障碍,研究者的这个设计可提升攻击的有效性、鲁棒性、隐蔽性和现实生活中的可实现性。

研究者选择了3种障碍物类型(交通锥、玩具车和长椅)进行测试,并在真实世界的驾驶数据上进行评估。他们的结果显示,在不同的障碍物类型和多传感器融合算法中,攻击实现了>=91%的成功率。
为了了解攻击在真实世界中的可实现性和严重性,研究者3D打印了生成的恶意障碍物,并在使用了多传感器融合感知得真车上进行评估。

3D打印出的恶意障碍物
研究者发现恶意的障碍物可以在总共108个传感器帧中的107帧中(99.1%)成功躲过多传感器融合的检测。在一个微缩模型的实验环境中,研究者发现恶意的障碍物在不同的随机抽样位置有85-90%的成功率躲避多传感器融合感知的检测,而且这种有效性可以转移。
研究者认为比较切实可行的防御手段是去融合更多的感知源,比如说更多的不同位置的camera和LiDAR,或者考虑加入RADAR。但是这不能从根本上防御,只能让恶意攻击更加困难。
截至2021年5月18日,研究人员对31家开发或者测试无人车的公司进行了漏洞报告,其中19家(约61%)已经回复并表示目前正在调查其影响以及受到影响的程度。
想查看更多微信群的小伙伴, 可以点击上面导航栏的微信群 或者下面按钮!
点我查看更多微信群
分享

在浩瀚的商业海洋中,总有一些企业以其独特的精神内核,引领着行业前行的方向。作为一家具有“马拉松基因”的企业,君乐宝乳业集...

快科技4月3日消息,小米SU7爆燃事故让人痛心的同时,这也让各界重新审视了一路狂奔发展的新能源车企们。在国内新能源车企发...

多彩贵州网讯 在贵州中航电梯有限责任公司智能化生产线上,26台智能机器人正演绎着“数字芭蕾”——机械臂精准完成折弯、焊接...

快科技4月2日消息,今日,OPPO发布全新影像技术品牌LUMO凝光影像。官方介绍,通过强大光学设计和先进计算能力的相互驱...

作为中国乳业科技创新领军企业,君乐宝通过构建"全产业链自主可控+世界级标准体系"双轮驱动模式,持续完善产学研深度融合的...

Walmart作为全球最大的零售商之一,其线上店铺同样在全球电商市场中占有重要地位。根据最新的市场数据和趋势分析,带大家...